English / Japanese
RYU, Takeda
- Affiliation
- Contact
- Address: Yoshida-Hommachi, Sakyo-ku, Kyoto 606-8501, Japan
- Room: #413 (2nd Laboratory room)
- TEL : +81-075-753-4952
- MAIL: rtakeda [at] kuis.kyoto-u.ac.jp
Research
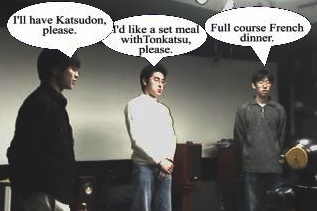
Our goal is to achieve a speech interacton between human and robot(system)
at anywhere and any situations.
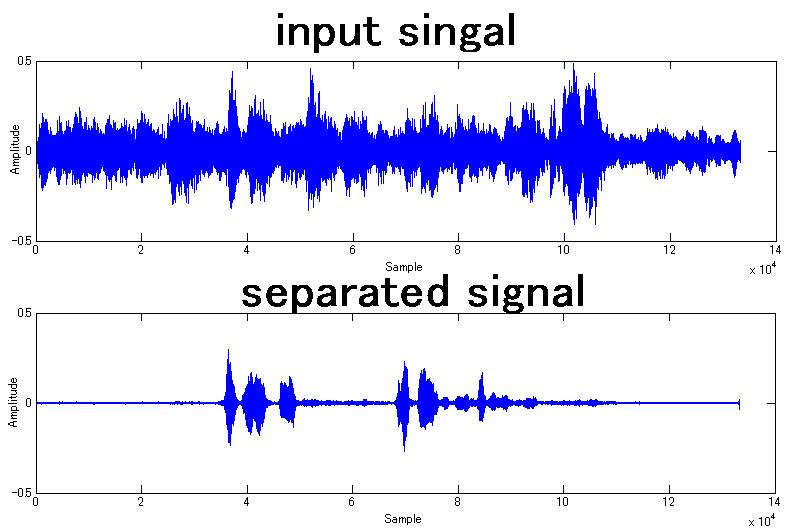
The sound source separation technique is very important technique for it
because it can separate many sources and robot only recognize the proper separated sound source.
Now, I focus on the Independent Component Analysis (ICA) as a sound source separation method.
Since ICA have few assumptions about sound source,
it is suitable for robot audition or hands-free automatic speech recognition.
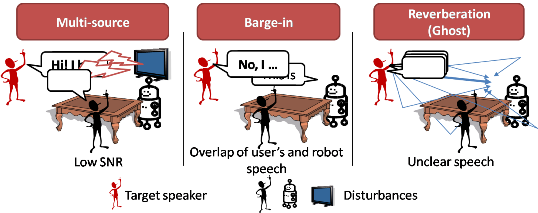
The main problems are there are many noises compared with the
Spoken dialogue system
which requires a head-set microphone (it captures almost no noises).
My interests
- Microphone array processing
- Sound source localization,
- Blind source separation (BSS),
- Blind dereverberation (BD),
- Echo cancellation (EC),
- Automatic speech recognition (ASR)
- Sound source identification,
- Missing/Unsertain data techniques,
- Spoken dialogue system,
- Synchronization of frogs's calling

Now, I am trying to realize BSS, BD, and EC using Independent Component Analysis (ICA) framework.
Links
Publications
- Peer-reviewed Journal Papers
-
Ryu Takeda,
Kazuhiro Nakadai,
Toru Takahashi,
Kazunori Komatani,
Tetsuya Ogata,
Hiroshi G. Okuno
:"Efficient Blind Dereverberation and Echo Cancellation based on Independent Component Analysis for Actual Acoustic Signals", Neural Computation, Accepted, MIT Press, July 10, 2011
-
Ryu Takeda,
Kazuhiro Nakadai,
Toru Takahashi,
Kazunori Komatani,
Tetsuya Ogata,
Hiroshi G. Okuno
: "Robot Audition based on Multiple-Input Independent Component Analysis for Recognizing Barge-in Speech under Reverberation," Journal of Robotics Society of Japan, Vol.27, No.7/8, pp.782--792, 2009. (in Japanese)
-
Ryu Takeda,
Kazuhiro Nakadai,
Kazunori Komatani,
Tetsuya Ogata,
Hiroshi G. Okuno
: "Robot Audition using an Adaptive Filter Based on Independent Component Analysis," Journal of Robotics Society of Japan,
Vol.26, No.6 (Sep. 2008) pp.229-536. (in Japanese)
- Main Conference Papers
-
Ryu Takeda,
Kazuhiro Nakadai,
Toru Takahashi,
Kazunori Komatani ,
Tetsuya Ogata,
Hiroshi G. Okuno
:"Upper-limit Evaluation of a Robot Audition based on ICA-BSS in Multi-source, Barge-in and Highly Reveberant Conditions,"
Proceedings of IEEE-RAS International Conference on Robotics and Automation (ICRA-2010),
accepted, (847/2062), May 3-8, 2010, Anchorage, Aalaska, USA.
-
Ryu Takeda,
Kazuhiro Nakadai,
Toru Takahashi,
Kazunori Komatani,
Tetsuya Ogata,
Hiroshi G. Okuno
:"Step-size Parameter Adaptation of Multi-channel Semi-blind ICA with Piecewise Linear Model for Barge-in-able Robot Audition,"
Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS-2009) ,
accepted (900/1650), IEEE, RSJ, St. Louis, 11-15 Oct. 2009.
-
Ryu Takeda,
Kazuhiro Nakadai,
Toru Takahashi,
Kazunori Komatani,
Tetsuya Ogata,
Hiroshi G. Okuno
:"ICA-BASED EFFICIENT BLIND DEREVERBERATION AND ECHO CANCELLATION METHOD FOR BARGE-IN-ABLE ROBOT AUDITION,"
Proceedings of 2009 International Conference on Acoustics, Speech and Signal Processing (ICASSP'2009) ,
SS-L7.1, pp.3677-3680, (1178/2633), Taipei, Taiwan,
April 19 - April 24, 2009.
- Others
Here (in Japanese)
Copyright (C) 2009-2010 Ryu Takeda All Rights Reserved.